ISAAC-COSP
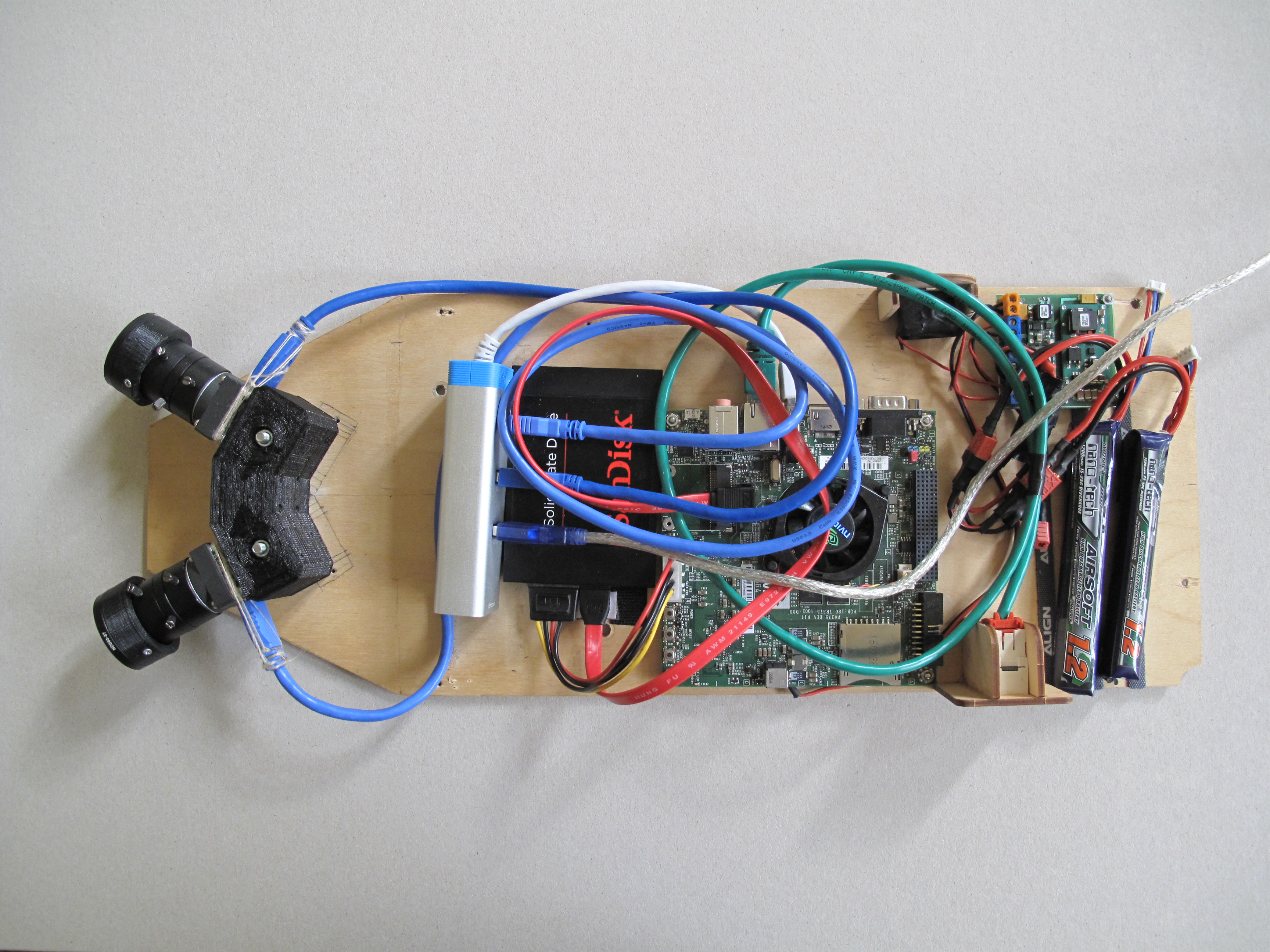
Részlegünk az MTA-SZTAKI ISAAC belső pályázatának keretében egy olyan két kamerás látórendszert fejleszt, amely az intézet Sindy robotrepülőgépére felszerelve képes valós időben detektálni és követni egy másik kis méretű robotrepülőgépet, illetve képes eldönteni, hogy a másik gép veszélyesen meg fogja-e közelíteni.
A rendszer több algoritmikus komponensét a társ részlegek fejlesztik ki, a Számítógépes Optikai Érzékelés és Feldolgozás Kutatólaboratórium felel a hardver konfigurációért és a modulok integrálásáért. Részlegünk fejleszti a detektáló és követő algoritmusokat.
A fejlesztés az MTA-SZTAKI ISAAC (Image-based See and Avoid in Adverse Conditions magyarul: Kedvezőtlen körülmények közötti kamera alapú látni és elkerülni megoldás) belső pályázatának része. A Pályázatban részlegünkön kívül a Rendszer és irányításelméleti Kutatólaboratórium és az Informatikai kutatólaboratórium vesznek részt.
Az intézet Sindy robotrepülőgépére felszerelhető látórendszer fejlesztése, amely alkalmas valós repülési tesztesetekben más repülőgépek detektálására és követésére, valamint az ütközési szituációk felismerésére és kitérési parancs kiadására. A projekt célja az éghátteres detektálás és követés megoldása, illetve a földhátteres detekció és követés módszereinek vizsgálata.
Valós repülési teszten működő látórendszer, a saját és partner részlegek moduljainak integrálásával. Éghátteres elkerülés tagolt felhőzet esetén is. Föld hátteres detektálás és követés lehetőségeinek összegzése.