Többszenzoros környezetérzékelésről tartott plenáris előadást Benedek Csaba a ROBOVIS konferencián
A ROBOVIS 2020 robotika és számítógépes látás témájú nemzetközi konferencián tartott meghívott plenáris előadást többszenzoros környezetérzékelés témában Benedek Csaba, a Gépi Érzékelés Kutatólaboratórium (MPLab) munkatársa.
Az előadás áttekintést adott az MPLab Térinformatikai Számítások Kutatócsoportjának legfrissebb eredményeiről, melyek témája a különböző érzékelőkkel felszerelt autók és a térinformatikai rendszerek adatainak összekapcsolásával egy kölcsönös előnyöket hozó együttműködés kialakítása, ami valós idejű részletes adatokat szolgáltat a jövő önjáró autóinak, kiterjesztett szolgáltatásokat nyújtva az utasoknak, míg a városfelügyelet birtokában lévő adatbázisok gyors és olcsó karbantartását teszi lehetővé.
Az előadás három fő területen mutatott be új tudományos eredményeket, melyek elsősorban a kutató SZTAKI-s doktoranduszaival, Nagy Balázzsal és H. Zováthi Örkénnyel közös munkáin alapultak:
- mobil lézerszkenneléssel nyert nagyfelbontású 3D pontfelhők automatikus térképpé alakítása,
- részletgazdag 3D térkép felhasználása a zajos fedélzeti mérések kiegészítéséhez és a tájékozódás támogatásához,
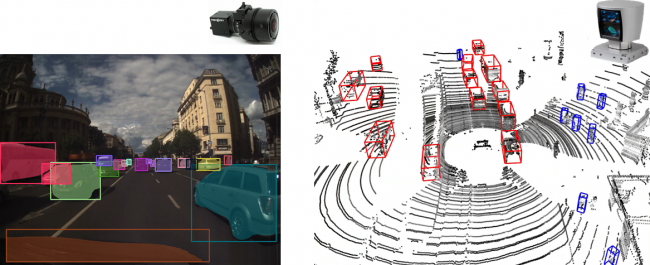
- a járműveken található Lidar és kameraszenzorok automatikus kalibrációja, ami a szenzorfúzió alapvető lépése